6SL3211OKB125UA1,6SL3211OKB125UA1
{心中有空间,梦想就有可能}
德国制造: 现货 联 系 人: 黄勇《黄工》 24小时联系手机: 13701633515
全新原装: 参数
质量保证: 保修
价格优势: 特价
我公司大量现货供应,价格优势,品质保证,德国原装进口

西门子(SIMATIC)PLC的6代西门子(SIMATIC)PLC的6代
1、西门子公司的产品最早是1975年投放市场的SIMATIC S3,它实际上是带有简单操作接口的二进制控制器。
2、1979年,S3系统被SIMATIC S5所取代,该系统广泛地使用了微处理器。
3、20世纪80年代初,S5系统进一步升级――U系列PLC,较常用机型:S5-90U、95U、100U、115U、135U、155U。
4、1994年4月,S7系列诞生,它具有更国际化、更高性能等级、安装空间更小、更良好的WINDOWS用户界面等优势,其机型为:S7-200、300、400。
5、1996年,在过程控制领域,西门子公司又提出PCS7(过程控制系统7)的概念,将其优势的WINCC(与WINDOWS兼容的操作界面)、PROFIBUS(工业现场总线)、COROS(监控系统)、SINEC(西门子工业网络)及控调技术融为一体。
6、西门子公司提出TIA(Totally Integrated Automation)概念,即全集成自动化系统,将PLC技术溶于全部自动化领域。
由最初发展至今,S3、S5系列PLC已逐步退出市场,停止生产,而S7系列PLC发展成为了西门子自动化系统的控制核心,而TDC系统沿用SIMADYN D技术内核,是对S7系列产品的进一步升级,它是西门子自动化系统最尖端,功能最强的可编程控制器。
S7-300如何通过GSD文件实现PROFIBUS DP主从通讯
1 GSD文件介绍
GSD文件是一种设备描述文件,一般以“*.GSD”或“*.GSE”为后缀。它描述了设备的功能参数,用来将不同厂家支持PROFIBUS产品集成在一起。另外在工程开发中有时候由于开发人员不同,要用两个独立的STEP 7项目来实现同一个PROFIBUS 网络通讯,此时需要借助GSD文件的方法来实现。
2 GSD文件的导入方法
下面以CPU314C-2DP为例,说明一下 GSD 文件的导入步骤:
首先从西门子网站上下载相关产品的 GSD 文件,下面是SIMATIC系列产品的GSD文件下载链接:113652
选择相关产品并下载到本地硬盘中。

图 1 GSD文件下载界面
打开SIMATIC Manager,进入硬件组态界面,选择菜单栏的“Options”->“Install GSD File…”,如图 2 所示。

图 2 安装GSD文件
进入GSD安装界面后,选择“Browse…”,选择相关GSD文件的保存文件夹,选择对应的GSD文件(这里选择语言为英文的“*.GSE”文件),点击“Install”按钮进行安装。

图 3 选择安装GSD文件
安装完成后可以在下面的路径中找到CPU314C-2DP,如图 4:

图 4 硬件目录中的保存路径
3 CP342-5做主站采用GSD方法实现PROFIBUS DP 通信
3.1网络拓扑介绍
PROFIBUS DP主站由CPU314+CP342-5组成,其中CP342-5做主站。
PROFIBUS DP 从站由CPU314C-2DP组成,集成的DP接口做从站。
网络拓扑图如下:

图 5 网络拓扑图
3.2 从站组态
首先插入SIMATIC S7-300站,添加CPU314-2DP,双击DP接口,分配一个PROFIBUS地址,然后在“Operating Mode”中选择“DP salve”模式,进入“Configuration”标签页,新建两行通信接口区,如图 6所示:

图 6 从站通信接口区
注意:上述从站组态的通信接口区和主站导入的GSD从站的通信接口区在顺序、长度和一致性上要保持一致。
3.3 主站组态及编程
3.3.1主站组态
首先插入SIMATIC S7-300站,添加CPU314以及CP342-5,然后双击CP342-5,将“Operating Mode”设置为“DP Master”。新建一条PROFIBUS网络。然后从硬件目录中选择CPU314C-2DP GSD文件(路径参照图4),添加到新建的PROFIBUS网络中,为其分配PROFIBUS地址,该地址要与前文的从站地址一致。
然后组态CPU314C-2DP从站对应的通信接口区。本文在硬件目录中CPU314C-2DP GSD文件下方选择了“Master_I Slave_Q 1B unit”和“Master_Q Slave_I 1B unit”,和从站组态时通信接口区保持一致,如图 7所示。

图 7 主站组态
3.3.2 主站编程
由于CP342-5提供的是虚拟地址映射区,所以需要分别调用FC1(DP_SEND)和FC2(DP_RECV)来实现数据访问。如图8 和图9所示。

图 8发送程序

图 9接收程序
如图7所示,主站侧在组态CPU314C-2DP GSD从站时,第一行通信接口区选择了“Master_I Slave_Q 1B unit”,“Master_I”对应主站的IB0。参照图6可知“Slave_Q”对应从站的QB0, 表示数据由从站的QB0发送到主站的IB0。又由于CP342-5通过调用FC2,将IB0读取的数据保存在MB11,所以数据由从站的QB0经过主站的IB0,最终保存在MB11。 同理可分析第二行通信接口区“Master_Q Slave_I 1B unit”。综上所述,主站和从站通信接口的对应关系,如表 1:
| 主站 | 传输方向 | 从站 |
| MB11(IB0) | | QB0 |
| MB10(QB0) | | IB0 |
表1 主站和从站通信接口区对应表
4 S7-300做主站采用GSD方法实现PROFIBUS DP 通信
4.1 网络拓扑介绍
PROFIBUS DP主站由CPU314C-2DP组成,集成的DP接口做主站。
PROFIBUS DP 从站由CPU314C-2DP组成,集成的DP接口做从站。
网络拓扑图如下:

图 10 网络拓扑图
4.2 从站组态
组态步骤同3.2节,这里不再赘述。
4.3 主站组态
首先新建S7-300站,添加CPU314C-2DP,双击DP接口,新建一条PROFIBUS网络。然后从硬件目录中选择CPU314C-2DP GSD文件(路径参照图4),添加到新建的PROFIBUS网络中,为其分配PROFIBUS地址,该地址要与前文的从站地址一致。
然后为CPU314C-2DP从站组态的通信接口区。本文在硬件目录中CPU314C-2DP GSD文件下方选择了“Master_I Slave_Q 1B unit”和“Master_Q Slave_I 1B unit”,必须和从站组态时通信接口区保持一致。如图 11所示。

图 11 主站组态
主站和从站通信接口区的对应关系如表 2 所示:
| 主站 | 传输方向 | 从站 |
| IB0 | | QB0 |
| QB0 | | IB0 |
表 2 主站和从站通信接口区对应表
注:文档涉及到西门子产品如下:
表 3 产品列表
| 产品名称 | 订货号 | 版本号 |
| STEP 7(英文版) | 6ES7 810 - 4CC08 - 0YA5 | V5.4 SP5 |
| CPU314C-2DP | 6ES7 314 - 6CG03 - 0AB0 | V2.6 |
| CPU314 | 6ES7 314 - 1AG13 - 0AB0 | V2.6 |
| CP342-5 | 6GK7 342 - 5DA02 - 0XE0 | V5.2 |
| PS307 | 6ES7 307 - 1EA00 - 0AA0 |
S7-200的仿真软件V2.0版使用方法与软件下载
S7-200的仿真软件不是西门子公司编写的,国内有人将它汉化,其V2.0版可以对S7-200编程软件V4.0 编写的程序仿真。该仿真软件不能对S7-200的全部指令和全部功能仿真。但是它仍然不失为一个很好的学习S7-200的工具软件。
该软件不需要安装,执行其中的“S7-200仿真.EXE”文件,就可以打开它。点击屏幕中间出现的画面,输入密码6596后按回车键,开始仿真。
软件自动打开的是老型号的CPU 214,应执行菜单命令“配置”→“CPU型号”,用打开的对话框设置CPU的型号为CPU 22x。
下图左边是CPU 224,CPU模块下面是用于输入数字量信号的小开关板。开关板下面的直线电位器用来设置SMB28和SMB29的值。
双击CPU模块右边空的方框,用出现的对话框添加扩展模块。

仿真软件不能直接接收S7-200的程序代码,必须用编程软件的“导出”功能将S7-200的用户程序转换为扩展名为“awl”的ASCII文本文件,然后再下载到仿真PLC中去。
在编程软件中打开主程序OB1,执行菜单命令“文件”→“导出”,导出ASCII文本文件。
在仿真软件中执行菜单命令“文件”→“装载程序”,在出现的对话框中选择下载什么块,点击“确定”按钮后,在出现的“打开”对话框中双击要下载的*.awl文件,开始下载。下载成功后,CPU模块上出现下载的ASCII文件的名称,同时会出现下载的程序代码文本框和梯形图(见下图)。

执行菜单命令“PLC”→“运行”,开始执行用户程序。 如果用户程序中有仿真软件不支持的指令或功能,执行菜单命令“PLC”→“运行”后,出现的对话框显示出仿真软件不能识别的指令。点击“确定”按钮,不能切换到RUN模式,CPU模块左侧的“RUN”LED的状态不会变化。
可以用鼠标点击CPU模块下面的开关板上的小开关来模拟输入信号,通过模块上的LED观察PLC输出点的状态变化,来检查程序执行的结果是否正确。
在RUN模式点击工具栏上的 按钮,可以用程序状态功能监视梯形图中触点和线圈的状态。
按钮,可以用程序状态功能监视梯形图中触点和线圈的状态。
执行菜单命令“查看”→“内存监控”,可以用出现的对话框监控V、M、T、C等内部变量的值。
S7-200可编程控制器STEP7-Micro/WIN32编程软件的安装
西门子S7-200可编程控制器PLC使用STEP7-Micro/WIN32编程软件进行编程。STEP7-Micro/WIN32编程软件是基于Windows的应用软件,功能强大,主要用于开发程序,也可用于适时监控用户程序的执行状态。加上汉化后的程序,可在全汉化的界面下进行操作。
1. 安装条件
操作系统:Windows95以上的操作系统。
计算机配置:IBM486以上兼容机,内存8MB以上,VGA显示器,至少50MB以上硬盘空间。
通信电缆:用一条PC/PPI电缆实现可编程控制器与计算机的通信。
2. 编程软件的组成
STEP7-Micro/WIN32编程软件包括Microwin3.1;Microwin3.1的升级版本软件Microwin3.1 SP1;Toolbox(包括Uss协议指令:变频通信用,TP070:触摸屏的组态软件Tp Designer V1.0设计师)工具箱;以及Microwin 3.11 Chinese(Microwin3.11 SP1和Tp Designer的专用汉化工具)等编程软件。
3. 编程软件的安装
按Microwin3.1→Microwin3.1 SP1→Toolbox→Microwin 3.11 Chinese的顺序进行安装。
首先安装英文版本的编程软件:双击编程软件中的安装程序SETUP.EXE,根据安装提示完成安装。接着,用Microwin 3.11 Chinese软件将编程软件的界面和帮助文件汉化。步骤如下:(1)在光盘目录下,找到“mwin_service_pack_from V3.1 to3.11”软件包,按照安装向导进行操作,把原来的英文版本的编程软件转换为3.11版本。(2)打开“Chinese3.11”目录;双击setup,按安装向导操作,完成汉化补丁的安装。(3)完成安装。
4. 建立S7-200 CPU的通信

图1 PLC与计算机的连接![]()
可以采用PC/PPI电缆建立PC机与PLC之间的通信。这是典型的单主机与PC机的连接,不需要其他的硬件设备。如图1所示。PC/PPI电缆的两端分别为RS-232和RS-485接口,RS-232端连接到个人计算机RS-232通信口COM1或COM2接口上,RS-485端接到S7-200 CPU通信口上。PC/PPI电缆中间有通信模块,模块外部设有波特率设置开关,有5种支持PPI协议的波特率可以选择,分别为:1.2K,2.4K,9.6K,19.2K,38.4K。系统的默认值为9.6K b/s。PC/PPI电缆波特率设置开关(DIP开关)的位置应与软件系统设置的通信波特率相一致。DIP开关如图2所示,DIP开关上有5个扳键,1、2、3号键用于设置波特率,4号和5号键用于设置通信方式。通信速率的默认值为9600bit/s,如图2所示,1、2、3号键设置为010,未使用调制解调器时,4、5号键均应设置为0。

5. 通信参数的设置
硬件设置好后,按下面的步骤设置通信参数。
(1)在STEP7-Micro/WIN32运行时单击通信图标,或从“视图(View)”菜单中选择“通信(Communications)”,则会出现一个通信对话框。
(2)对话框中双击PC/PPI电缆图标,将出现PC/PG接口的对话框。
(3)单击“属性(Properties)”按钮,将出现接口属性对话框,检查各参数的属性是否正确,初学者可以使用默认的通信参数,在PC/PPI性能设置的窗口中按“默认(Default)”按钮,可获得默认的参数。默认站地址为2,波特率为9600b/s。
6. 建立在线连接
在前几步顺利完成后,可以建立与S7-200 CPU的在线联系,步骤如下:
(1)在STEP7-Micro/WIN32运行时单击通信图标,或从“视图(View)”菜单中选择“通信(Communications)”,出现一个通信建立结果对话框,显示是否连接了CPU主机。
(2)双击对话框中的刷新图标,STEP7-Micro/WIN32编程软件将检查所连接的所有S7-200CPU站。在对话框中显示已建立起连接的每个站的CPU图标、CPU型号和站地址。
(3)双击要进行通信的站,在通信建立对话框中,可以显示所选的通信参数。
7. 修改PLC的通信参数
计算机与可编程控制器建立起在线连接后,即可以利用软件检查、设置和修改PLC的通信参数。步骤如下:
(1)单击浏览条中的系统块图标,或从“视图(View)”菜单中选择“系统块(System Block)”选项,将出现系统块对话框。
(2)单击“通信口”选项卡,检查各参数,确认无误后单击确定。若须修改某些参数,可以先进行有关的修改,再单击“确认”。
(3)单击工具条的下载按钮![]() ,将修改后的参数下载到可编程控制器,设置的参数才会起作用。
,将修改后的参数下载到可编程控制器,设置的参数才会起作用。
8. 可编程控制器的信息的读取
选择菜单命令“PLC”,找“信息”,将显示出可编程控制器RUN/STOP状态,扫描速率,CPU的型号错误的情况和各模块的信息。
比较简单的实现PID闭环控制的方法
PID控制的难点在于整定控制器的参数。为了学习整定PID控制器参数的方法,必须做闭环实验,开环运行PID程序没有任何意义。用硬件组成一个闭环需要PLC的CPU模块、模拟量输入模块和模拟量输出模块,此外还需要被控对象、检测元件、变送器和执行机构。例如可以用电热水壶作为被控对象,用热电阻检测温度,用温度变送器将温度转换为标准电压,用移相控制的交流固态调压器作执行机构。
有没有比较简单的实现PID闭环控制的方法呢?
在控制理论中,用传递函数来描述被控对象、检测元件、执行机构和PID控制器。
被控对象一般是串联的惯性环节和积分环节的组合。在实验室可以用以运算放大器为核心的模拟电路来模拟广义的被控对象(包括检测元件和执行机构)的传递函数。我曾将这种运放电路用于S7-200和S7-1200的PID参数自动调节实验。
用运算放大器模拟被控对象一般需要做印刷电路板,还是比较麻烦。有没有更简单的方法呢?
除了用运算放大器来模拟被控对象的传递函数,也可以用PLC的程序来模拟。为此我编写了用来模拟被控对象的S7-200的子程序,它也可以用于S7-200 SMART。使用模拟的被控对象的PID闭环示意图如下图所示,虚线右边是被控对象,DISV是系统的扰动输入值。虚线左边是PLC的PID控制程序。

被控对象的数学模型为3个串联的惯性环节,其增益为GAIN,3个惯性环节的时间常数分别为TIM1~TIM3。其传递函数为

分母中的“s”为自动控制理论中拉普拉斯变换的拉普拉斯算子。将某一时间常数设为0,可以减少惯性环节的个数。图中被控对象的输入值INV是PID控制器的输出值。被控对象的输出值OUTV作为PID控制器的过程变量(反馈值)PV。
下图是模拟被控对象的子程序,实际上只用了两个惯性环节,其时间常数分别为5000ms和2000ms。用与PID的采样周期相同的定时中断时间间隔来调用这个子程序。

下图是用来监视PID回路运行情况的STEP 7-Micro/WIN的PID调节控制面板,可以用它进行PID参数自整定或手动调节PID参数的实验。标有PV(即被控量)的是过程变量的阶跃响应曲线。

将上图中的积分时间由0.03min(分钟)增大到0.12min,下图的超调量有明显的减小。通过修改PID的参数,观察被控量阶跃响应曲线给出的超调量和调节时间等特征量的变化情况,可以形象直观、快速地学习和掌握PID参数的整定方法。


S7-200系列PLC与WINCC以太网通信
CP243i作为连接S7-200的PPI口转以太网RJ45的接口转换器。如下图所示:

一. 硬件连接:
将CP243i的两端分别与S7-200的PPI口和以太网线连接(上图使用的是交叉网线,如果中间加交换机就要用直连网线,注:我们平时用的都是直连型网线)
二. 监控计算机的软件设置:
a.OPC―西门子PC_Access的设置:
S7-200一般都是通过PC_Access(OPC server)软件再与WinCC相连的。因此要首先
设置PC_Access, 但是在设置前一定要先运行一次西门子的MicroWin ,在它的设置PG/PC接口中选择 [ TCP/IP(Auto)à实际的网卡名 ],目地是将PC_Access的驱动选为TCP/IP, 之后打开PC_Access,见下图:

用鼠标右健点击 [ MicroWin(TCP/IP) ],然后用鼠标左键选择 [ 新PLC(N)… ]

只要填写 [ IP地址:192 .168 .1 .10 ](注:这是CP243i转换器的IP地址),然后直接点击 [ 确认 ] ,进入下图:

用鼠标点击 [NewPLC]à新(N) à项目(I) ,如下图所示:

新建项目的对话框:
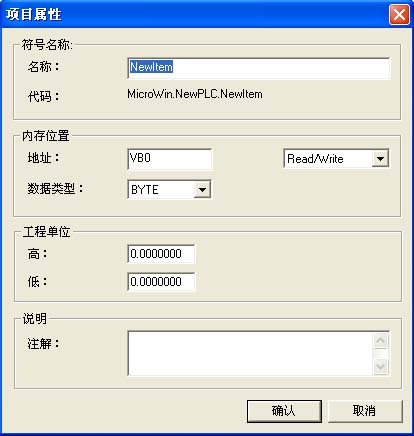
下边做4个例子:
(1)名称:ITEM_VB10,地址:VB10,数据类型:BYTE
(2)名称:ITEM_Q0_0,地址:Q0.0,数据类型:BOOL
(3)名称:ITEM_I0_2,地址:Q0.2,数据类型:BOOL
(4)名称:ITEM_MD20,地址:MD20,数据类型:REAL
添加完变量后,一定要存一下盘!至于文件名随便写一个或用缺省的也可
建立4个ITEM后,用鼠标安下图次序(1)(2)(3)依次点击,就进入了测试状态

如果通讯正常,质量显示为good 否则为bad
b. 西门子WinCC的设置:
打开WinCC,新建一个项目[ test_s7_200]:
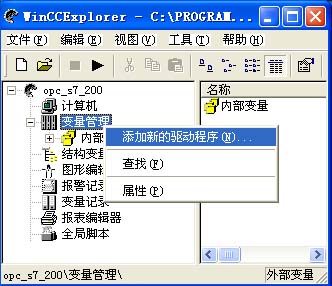
用鼠标右键点击 [变量管理] à 添加新的驱动程序(N) à选择 OPC.chn
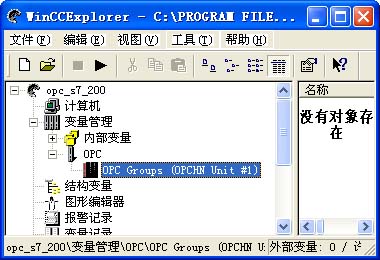
用鼠标右键点击 [OPC Groups (OPCHN Unit #1) ] à选择[ 系统参数 ]

用鼠标双击 [ \\<LOCAL> ] ,搜索本机OPC服务器:

选择 [ S7200.OPCServer ],再选择 [ 浏览服务器 ] ,
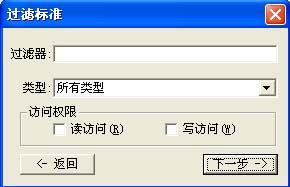
选择 [ 下一步 ]

将Items栏中内容全部选定,然后点击 [添加条目]
选择 [ 是 ]
选择 [ 确定 ]

选择 [ 完成 ],之后PC_Access中的变量就来到WinCC中:
