- 通过点对点连接(高信息率)进行高性能的信息传输
- 物理接口:RS 422/RS 485 (X.27)
- 最多 32 节点
- 执行的协议:ASCII, 3964 (R)
- 利用集成在 STEP7 中的参数设置工具可以方便地进行参数设置
- SIMATIC S7、SIMATIC S5 可编程逻辑控制器和非西门子控制器
- 编程器和PC机
- 机器人控制
- 扫描器,条码阅读器
- 测量系统
- 秤
- 坚固的塑料外壳
- LED指示灯:
用于指示 "发送", "接收" 或 "故障" - ASCII:
用于通过简单通讯协议连接到第三方系统,如带有开始和结束字符的协议或带有块检查字符的协议。 接口的握手信号可被扫描,并由用户程序来控制。 - 3964(R):
用于通过已标准化和公布的西门子 3964 (R) 协议连接到西门子设备或第三方设备。 另外还采用了一个带有默认值的 3964(R) 驱动程序和一个可编程 3964(R) 驱动程序。 - 用户可通过集成在 STEP 7 中的一个参数分配工具来指定模块特性,例如:
- 要使用哪个已实施协的议驱动程序,或
- 要使用哪些驱动程序相关功能
- 通过 CPU 进行参数化:
只需将编程设备与 CPU 相连。 组态数据归档在一个系统数据块中,而数据块存储在 CPU 中。 在更换一个模块时,新的模块可立即投入使用。 - 组态软件包(光盘):
含电子手册以及用于与 CP 通讯的参数化屏幕和标准功能块 - 20个不同的CPU:
- 7种标准型CPU(CPU 312,CPU 314,CPU 315-2 DP,CPU 315-2 PN/DP,CPU 317-2 DP,CPU 317-2 PN/DP,CPU 319-3 PN/DP)
- 6 个紧凑型 CPU(带有集成技术功能和 I/O)(CPU 312C、CPU 313C、CPU 313C-2 PtP、CPU 313C-2 DP、CPU 314C-2 PtP、CPU 314C-2 DP)
- 5 个故障安全型 CPU(CPU 315F-2 DP、CPU 315F-2 PN/DP、CPU 317F-2 DP、CPU 317F-2 PN/DP、CPU 319F-3 PN/DP)
- 2种技术型CPU(CPU 315T-2 DP, CPU 317T-2 DP)
- 18种CPU可在-25°C 至 +60°C的扩展的环境温度范围中使用
- 具有不同的性能等级,满足不同的应用领域。
- CPU 312,用于小型工厂
- CPU 314,用于对程序量和指令处理速率有额外要求的工厂
- CPU 315-2 DP,用于具有中/大规模的程序量以及使用PROFIBUS DP进行分布式组态的工厂
- CPU 315-2 PN/DP,用于具有中/大规模的程序量以及使用PROFIBUS DP和PROFINET IO进行分布式组态的工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
- CPU 317-2 DP,用于具有大容量程序量以及使用PROFIBUS DP进行分布式组态的工厂
- CPU 317-2 PN/DP,用于具有大容量程序量以及使用PROFIBUS DP和PROFINET IO进行分布式组态的工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
- CPU 319-3 PN/DP,用于具有极大容量程序量何组网能力以及使用PROFIBUS DP和PROFINET IO进行分布式组态的工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
- CPU 312C,具有集成数字量 I/O 以及集成计数器功能的紧凑型 CPU
- CPU 313C,具有集成数字量和模拟量 I/O 的紧凑型 CPU
- CPU 313C-2 PtP,具有集成数字量 I/O 、2个串口和集成计数器功能的紧凑型 CPU
- CPU 313C-2 DP,具有集成数字量 I/O 、PROFIBUS DP 接口和集成计数器功能的紧凑型 CPU
- CPU 314C-2 PtP,具有集成数字量和模拟量 I/O 、2个串口和集成计数、定位功能的紧凑型 CPU
- CPU 314C-2 DP,具有集成数字量和模拟量 I/O、PROFIBUS DP 接口和集成计数、定位功能的紧凑型 CPU
- CPU 315T-2 DP,用于使用 PROFIBUS DP进行分布式组态、对程序量有中/高要求、同时需要对8个轴进行常规运动控制的工厂。
- CPU 317T-2 DP,用于使用 PROFIBUS DP进行分布式组态、对程序量有高要求、又必须同时能够处理运动控制任务的工厂
- CPU 315F-2 DP,用于采用 PROFIBUS DP 进行分布式组态、对程序量有中/高要求的故障安全型工厂
- CPU 315F-2 PN/DP,用于具有中/大规模的程序量以及使用PROFIBUS DP和PROFINET IO进行分布式组态的工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
- CPU 317F-2 DP,用于具有大容量程序量以及使用PROFIBUS DP进行分布式组态的故障安全工厂
- CPU 317F-2 PN/DP,用于具有大容量程序量以及使用PROFIBUS DP和PROFINET IO进行分布式组态的工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
- CPU 319F-3 PN/DP,用于具有大容量程序量以及使用PROFIBUS DP和PROFINET IO进行分布式组态的故障安全型工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
-

西门子PLC模块6ES7288-1CR60-0AA0,西门子PLC模块6ES7288-1CR60-0AA0
德国制造: 现货 联 系 人: 黄勇《黄工》 24小时联系手机: 13701633515(同号)
全新原装: 参数
质量保证: 保修 直线销售 电 话: 021-31660605 在 线 商 务 QQ: 77956468
价格优势: 特价
高效工程组态成就高效自动化
CP 440 通讯模块通过 RS 422/RS 485(X27)进行高性能的短消息帧传送。该特点可促使实现上述所有点对点连接。
例如,点对点连接可用于:
RS 485 接口允许最多连接 32 个通讯连接。

通讯处理器有以下机械特性:
CP 440 也可在扩展机架中使用。但是,必须保证C总线信号的传输。在“技术规范”中列出了使用范围。
采用了多种标准协议,因此可与广泛的节点进行数据交换:
参数化
CP 440 通讯处理器的参数化极为简单而方便:
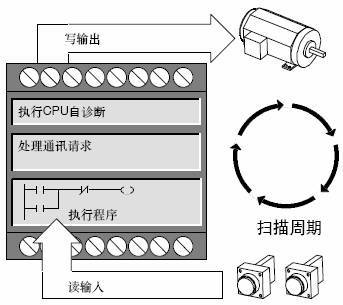
S7-200的工作过程和CPU的工作模式
1) S7-200在扫描循环中完成一系列任务。任务循环执行一次称为一个扫描周期。S7-200的工作过程如图4所示。在一个扫描周期中,S7-200主要执行下列五个部分的操作:
(Ⅰ)读输入:S7-200从输入单元读取输入状态,并存入输入映像寄存器中。
(Ⅱ)执行程序:CPU根据这些输入信号控制相应逻辑,当程序执行时刷新相关数据。程序执行后,S7-200将程序逻辑结果写到输出映像寄存器中。
(Ⅲ)处理通讯请求:S7-200执行通讯处理。
(Ⅳ)执行CPU自诊断:S7-200检查固件、程序存储
器和扩展模块是否工作正常
(Ⅴ)写输出:在程序结束时,S7-200将数据从输出映像寄存器中写入把输出锁存器,最后复制到物理输出点,驱动外部负载。
(2)、S7-200 CPU的工作模式
S7-200有两种操作模式:停止模式和运行模式。CPU面板上的LED状态灯可以显示当前的操作模式。
在停止模式下,S7--200不执行程序,您可以下载程序和CPU组态。在运行模式下,S7-200将运行程序。
S7-200提供一个方式开关来改变操作模式。您可以用方式开关(位于S7-200前盖下面)手动选择操作模式:当方式开关拨在停止模式,停止程序执行;当方式开关拨在运行模式,启动程序的执行;也可以将方式开关拨在TERM(终端)(暂态)模式,允许通过编程软件来切换CPU的工作模式,即停止模式或运行模式。
如果方式开关打在STOP或者TERM模式,且电源状态发生变化,则当电源恢复时,CPU会自动进入STOP模式。如果方式开关打在RUN模式,且电源状态发生变化,则当电源恢复时,CPU会进入RUN模式。

SIMATIC S7-300 提供多种性能等级的 CPU。除了标准型 CPU 外,还提供紧凑型 CPU。
同时还提供技术功能型 CPU 和故障安全型 CPU。
下列标准型CPU 可以提供:
下列紧凑型CPU 可以提供:
下列技术型CPU 可以提供:
下列故障安全型CPU 可以提供:
西门子PLC S7-200的寻址方式
S7-200编程语言的基本单位是语句,而语句的构成是指令,每条指令有两部分:一部分是操作码,另一部分是操作数。操作码是指出这条指令的功能是什么,操作数则指明了操作码所需要的数据所在。所谓寻址,就是寻找操作数的过程。S7-200 CPU的寻址分三种:立即寻址、直接寻址、间接寻址。
1.立即寻址
在一条指令中,如果操作码后面的操作数就是操作码所需要的具体数据,这种指令的寻址方式就叫立即寻址。
如:在传送指令中:MOV IN OUT――操作码“MOV”指出该指令的功能把IN中的数据传送到OUT中,其中IN――源操作数,OUT――目标操作数。
若该指令为:MOVD 2505 VD500
功能:将十进制数2505传送到VD500中,这里2505就是源操作数。因这个操作数的数值已经在指令中了,不用再去寻找,这个操作数即立即数。这个寻址方式就是立即寻址方式。而目标操作数的数值在指令中并未给出,只给出了要传送到的地址VD500,这个操作数的寻址方式就是直接寻址。
2.直接寻址
在一条指令中,如果操作码后面的操作数是以操作数所在地址的形式出现的,这种指令的寻址方式就叫直接寻址。
如:MOVD VD400 VD500
功能:将VD400中的双字数据传给VD500
3.间接寻址
在一条指令中,如果操作码后面的操作数是以操作数所在地址的地址形式出现的,这种指令的寻址方式就叫间接寻址。
如:MOVD 2505 *VD500
*VD500是指存放2505的地址的地址。
如VD500中存放的是VB0,则VD0则是存放2505的地址。
该指令的功能:将十进制数2505传送给VD0地址中。
STEP7-Mirco/WIN编程元素及项目组件
s7-200的三种程序组织单位(POU)指主程序、子程序和中断程序。STEP 7-Micro/WIN为每个控制程序在程序编辑器窗口提供分开的制表符,主程序总是第一个制表符,后面是子程序或中断程序。 一个项目(Project)包括的基本组件有程序块、数据块、系统块、符号表、状态图表、交叉引用表。程序块、数据块、系统块须下载到PLC,而符号表、状态图表、交叉引用表不下载到PLC。 程序块由可执行代码和注释组成,可执行代码由一个主程序和可选子程序或中断程序组成。程序代码被编译并下载到PLC,程序注释被忽略。 2 2 在“指令树”中 右击“程序块”图标可以插入子程序和中断程序。 数据块由数据(包括初始内存值和常数值)和注释两部分组成。 数据被编译后,下载到可编程控制器,注释被忽略。 系统块用来设置系统的参数,包括通信口配置信息、保存范围、模拟和数字输入过滤器、背景时间、密码表、脉冲截取位和输出表等选项。系统块如图1所示。 2 2 单击“浏览栏”上的“系统块”按钮,或者单击“指令树”内的“系统块”图标,可查看并编辑系统块。 系统块的信息须下载到可编程控制器,为PLC提供新的系统配置。 
S7-200 PLC高速计数器指令的使用简介
(1)每个高速计数器都有一个32位当前值和一个32位预置值,当前值和预设值均为带符号的整数值。要设置高速计数器的新当前值和新预置值,必须设置控制字节(表6-7),令其第五位和第六位为1,允许更新预置值和当前值,新当前值和新预置值写入特殊内部标志位存储区。然后执行HSC指令,将新数值传输到高速计数器。当前值和预置值占用的特殊内部标志位存储区如表1所示。
表1 HSC0-HSC5当前值和预置值占用的特殊内部标志位存储区
| 要装入的数值 | HSC0 | HSC1 | HSC2 | HSC3 | HSC4 | HSC5 |
| 新的当前值 | SMD38 | SMD48 | SMD58 | SMD138 | SMD148 | SMD158 |
| 新的预置值 | SMD42 | SMD52 | SMD62 | SMD142 | SMD152 | SMD162 |
除控制字节以及新预设值和当前值保持字节外,还可以使用数据类型HC(高速计数器当前值)加计数器号码(0、1、2、3、4或5)读取每台高速计数器的当前值。因此,读取操作可直接读取当前值,但只有用上述HSC指令才能执行写入操作。
(2)执行HDEF指令之前,必须将高速计数器控制字节的位设置成需要的状态,否则将采用默认设置。默认设置为:复位和起动输入高电平有效,正交计数速率选择4×模式。执行HDEF指令后,就不能再改变计数器的设置,除非CPU进入停止模式。
(3)执行HSC指令时,CPU检查控制字节和有关的当前值和预置值。