| 详细介绍: 西门子变频器6SL3211-0AB17-5BA1,西门子变频器6SL3211-0AB17-5BA1 {心中有空间,梦想就有可能} 德国制造: 现货 联 系 人: 黄勇《黄工》 24小时联系手机: 13701633515
全新原装: 参数
质量保证: 保修
价格优势: 特价
我公司大量现货供应,价格优势,品质保证,德国原装进口

西门子变频器6SL3211-0AB17-5BA1 比较简单的实现PID闭环控制的方法 PID控制的难点在于整定控制器的参数。为了学习整定PID控制器参数的方法,必须做闭环实验,开环运行PID程序没有任何意义。用硬件组成一个闭环需要PLC的CPU模块、模拟量输入模块和模拟量输出模块,此外还需要被控对象、检测元件、变送器和执行机构。例如可以用电热水壶作为被控对象,用热电阻检测温度,用温度变送器将温度转换为标准电压,用移相控制的交流固态调压器作执行机构。
有没有比较简单的实现PID闭环控制的方法呢?
在控制理论中,用传递函数来描述被控对象、检测元件、执行机构和PID控制器。
被控对象一般是串联的惯性环节和积分环节的组合。在实验室可以用以运算放大器为核心的模拟电路来模拟广义的被控对象(包括检测元件和执行机构)的传递函数。我曾将这种运放电路用于S7-200和S7-1200的PID参数自动调节实验。
用运算放大器模拟被控对象一般需要做印刷电路板,还是比较麻烦。有没有更简单的方法呢?
除了用运算放大器来模拟被控对象的传递函数,也可以用PLC的程序来模拟。为此我编写了用来模拟被控对象的S7-200的子程序,它也可以用于S7-200 SMART。使用模拟的被控对象的PID闭环示意图如下图所示,虚线右边是被控对象,DISV是系统的扰动输入值。虚线左边是PLC的PID控制程序。

被控对象的数学模型为3个串联的惯性环节,其增益为GAIN,3个惯性环节的时间常数分别为TIM1~TIM3。其传递函数为

分母中的“s”为自动控制理论中拉普拉斯变换的拉普拉斯算子。将某一时间常数设为0,可以减少惯性环节的个数。图中被控对象的输入值INV是PID控制器的输出值。被控对象的输出值OUTV作为PID控制器的过程变量(反馈值)PV。
下图是模拟被控对象的子程序,实际上只用了两个惯性环节,其时间常数分别为5000ms和2000ms。用与PID的采样周期相同的定时中断时间间隔来调用这个子程序。

下图是用来监视PID回路运行情况的STEP 7-Micro/WIN的PID调节控制面板,可以用它进行PID参数自整定或手动调节PID参数的实验。标有PV(即被控量)的是过程变量的阶跃响应曲线。

将上图中的积分时间由0.03min(分钟)增大到0.12min,下图的超调量有明显的减小。通过修改PID的参数,观察被控量阶跃响应曲线给出的超调量和调节时间等特征量的变化情况,可以形象直观、快速地学习和掌握PID参数的整定方法。

西门子PLC网络读写指令向导使用指南 PPI协议是专门为S7-200开发的通信协议。S7-200 CPU的通信口(Port 0、Port 1)均支持PPI通信协议。S7-200 CPU的PPI网络通信是建立在RS-485网络的硬件基础上,因此其连接属性和需要的网络硬件设备与其他RS-485网络一致。
1 网络读写(NETR/NETW)指令介绍 网络读写指令一般用于S7-200 CPU之间的PPI网络通信。PPI通信前要保证PPI网络上的所有站点都应当有各自不同的网络地址,否则通信不会正常进行。另外,网络读写指令进行编程和应用时要注意以下几点:
1) 在程序中可以使用任意条网络读写指令,但是在同一时刻,最多只能有8条网络读写指令被激活;
2) 每条网络读写指令可以从远程站点读取/写入最多16个字节的信息;
3) 使用NETR/NETW指令向导可以编辑最多24条网络读写指令,其核心是使用顺序控制指令,这样在任一时刻只有一条NETR/NETW指令有效;
4) 每个CPU的端口只能配置一个网络读写指令向导。
2 网络读写指令向导组态 2.1 硬件连接 下面通过一个实例(两台S7-200 PLC之间的通信)来介绍如何使用网络读写指令向导。首先,两个S7-200之间的硬件连接需要一根标准DP电缆加两个DP总线插头。两台S7-200的RS485通信端口连接方式,可参考以下图片中的连接方式(如果PLC有两个通信端口,则任意端口都可进行配置,本例中两个PLC均以Port 0口做PPI通信使用),如图1所示。

图1 两台PLC的网络连接
2.2 NETR/NETW向导组态过程 2.2.1设定通信站地址 首先,用PC/PPI编程电缆将两台PLC的网络站地址分别设置为2和3,波特率都为9.6Kbps。这时,将编程电缆连接到任一个CPU带可编程插口的DP插头上,查找两台PLC的站地址,如图2所示。
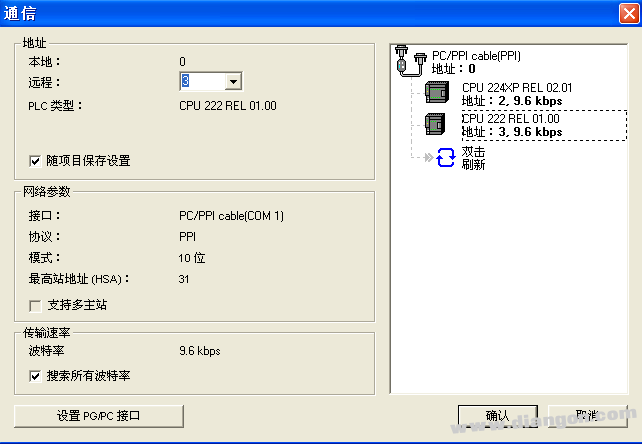
图2 设定两台CPU的网络地址
在本例中,选定通信地址为3的PLC为网络主站,并对其进行向导配置。选定要做为通信主站的CPU地址,点击确认后即可进入该CPU的编程界面。另外,网络读写指令向导会自动将CPU设置成主站模式,不必另行编程设置,只需为主站编写通信程序,从站直接使用通信缓冲区中的数据,或将数据整理到通信区即可。
2.2.2 向导配置步骤 进入到编程画面后,点击工具菜单栏,找到指令向导选项,准备进入网络读/写功能的向导配置模式,如图3所示。
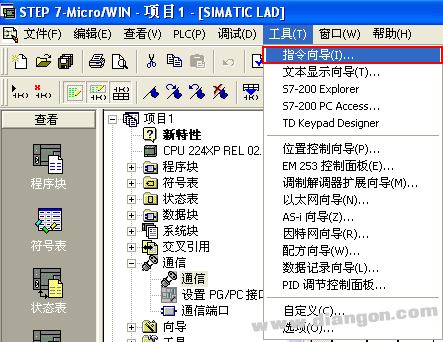
图3 进入指令向导编程界面
打开指令向导界面,选择NETR/NETW指令功能,如图4所示。
允许在运行时超过装置额定铭牌上指定的额定直流(最大允许连续直流电流)。但是超过的程度和持续时间要受到特定的限制,这在下面进行详细说明。 过载电流的绝对上限是 1.8 倍的额定直流电流。最高过载持续时间取决于过载电流的时间特性,以及该装置的过载历史,还取决于具体的设备情况。 每次过载都必定跟随有欠载(过载相的负载电流小于额定直流电流)。一旦达到最高允许过载持续时间,负载电流必须返回到至少绝对值 ≤ 额定直流电流。 通过对电源部分进行热监视可以确定动态过载持续时间(I2t 监视)。I2t 监视使用实际负载电流的时间特性计算环境温度以上晶闸管损耗层温度上升的替代值的时间特性。在这种情况下,要把具体的设备特性(例如热阻和时间常数)加入到计算中。当转换器打开时,计算过程从初始值开始,该初始值在关断/线路供电故障之前确定。在设置参数时必须把环境条件(环境温度和安装高度)考虑进来。 计算获得的替代消耗层温度上升超过允许值时,I2t监视会发出响应。作为响应,有两种选择可以被参数化: - 电枢电流设置值下降到额定直流电流报警,或
- 设备关机故障
可以禁用 I2t 监视功能。在这种情况下,电枢电流最高限制为额定直流电流。 动态过载能力的组态 组态单包含以下信息: - 最长负载持续时间tan从低温电源部分和指定恒定负载时算起,
- 最长零电流间隔tab(最长冷却时间)直到电源部分达到“低温”热状态,以及
- 极限特性的磁场,用于确定热稳定、过载间歇运行期间的过载能力(周期性工作循环)
备注:如果计算获得的替代损耗层温度上升不超过最高允许值的 5%,则认为电源部分处于“低温”状态。该状态可以使用二进制可分配输出查询。 带过载间歇运行时具有极限特性的磁场结构 具有极限特性的磁场是指具有总持续时间 300s 的间歇过载运行的负载循环。这种负载循环包括两个时间部分――基本负载持续时间(电枢电流实际值 ≤ 额定直流电流)和过载持续时间(电枢电流实际值 ≥ 额定直流电流)。 每个极限特性会把一个特定装置的最大基本负载电流表示成针对最小负载持续时间(极限基本负载电流)的过载系数(极限基本负载电流,按额定直流电流的 a% 计算)。对于负载循环的剩余持续时间,最大允许过载电流通过过载系数确定。如果对于所需的过载系数没有指定极限特性,则要遵守针对下一个最高过载系数的极限特性。 极限特性的励磁对于 300s 负载循环有效。使用基本计算算法,负载循环可以长于或短于 300s 的负载循环持续时间组态。现在使用两个基本任务显示。 大量功能特性为用户针对 S7-300 进行的编程、调试和维护提供支持。 - 快速的指令处理:
指令处理时间为 0.01μs,可在低端和中端性能范围中完全开辟新的应用。 - 浮点算术运算:
使用浮点运算可以有效地执行更为复杂的运算功能。 - 用户友好的参数设置:
只需一个带有统一用户界面的软件工具便可参数化所有模块。熟悉和培训时间较短。 - 操作和监控 (HMI):
用户友好的人机界面 (HMI) 服务已集成在 S7-300 的操作系统中。这些功能不再需要耗时的编程:SIMATIC HMI 系统需要来自 SIMATIC S7-300 的过程数据 - S7-300 按照请求的更新周期传输过程数据。SIMATIC S7-300 操作系统可自主执行传输。所有这些都是使用同一的符号和数据库完成的。 - 诊断功能:
CPU 的智能诊断系统连续检查系统功能并记录故障和特定系统事件(例如,时间错误、模块故障等)。这些事件已加上时间标签并储存在循环缓冲器内以用于将来故障排除。 - 口令保护:
通过密码保护功能,用户可有效地保护他们的专有技术免遭未经授权的复制和更改。 SIMATIC S7-300 符合以下国内和国际标准: - DIN
- UL 认证
- CSA 认证
- FM 等级 1 div.2;A、B、C 和 D 组(温度组 T4 (≤135℃)
- ATEX 认证
- 澳大利亚标志
- 以下船级社资格认证
- 美国船级社
- 法国船级社
- 挪威船级社
- 德国船级社
- 英国劳氏船级社
- 日本船级社(NK)
- 地震保护
通讯 SIMATIC S7-300 的 CPU 支持下列通讯模式: - 过程通讯:
用于通过总线(AS-Interface、PROFIBUS DP 或 PROFINET)的 I/O 模块(过程映像交换)循环寻址。从循环执行层调用过程通讯。 - 数据通讯:
用于自动化系统间或多个自动化系统与HMI之间的数据交换。可以周期性地执行数据通讯,或由用户程序通过程序块的事件驱动程序调用进行数据通讯 STEP 7 用户界面使用方便,可用于对通讯功能进行组态,使组态更加容易。 数据通讯 SIMATIC S7-300 配备不同的数据通讯机制: - 使用全局数据通讯通过 MPI 在网络连接的 CPU 之间进行的数据包循环交换。
- 与具有通讯功能的其他设备进行的事件驱动通讯。可通过 MPI、PROFIBUS 或 PROFINET 进行网络连接。
全局数据 通过使用“全局数据通讯”服务,联网的 CPU 可以循环方式相互交换数据(最多 8 GD 数据包,每个包含 22 字节/循环)。通过这种方式,一个 CPU 访问可另一个 CPU 的数据、位存储器或过程映像。只能通过 MPI 进行全局数据交换。使用 STEP 7 中的 GD 表进行组态。 通讯功能 可以使用集成在系统中的功能块建立与 S7/C7 合作伙伴的通讯服务。 这些服务是: - 通过 MPI 进行 S7 基本通讯。
- 通过 MPI、C 总线、PROFIBUS 和 PROFINET/工业以太网的 S7 通讯。
S7-300 可以用于: - 作为服务器,通过 MPI、C 总线和 PROFIBUS 通讯
- 作为服务器或客户端,通过集成的 PROFINET 接口通讯
可以使用加载的功能块建立与 S5 对等和非西门子设备的通讯服务。 这些服务是: - 通过PROFIBUS和工业以太网进行S5兼容通讯。
- 通过PROFIBUS和工业以太网与第三方系统进行标准通讯。
与全局数据相比,必须建立通讯功能的通讯链路。 集成到 IT 世界 通过 S7-300,可将当今的 IT 技术方便的集成到自动化系统中。使用 CP 343-1 Advanced 可以实现下列 IT 功能: - IP 路由;
通过 IP 访问列表可在千兆以太网和 PROFINET 接口之间转发 IP V4 报文 - WEB 服务器;
通过标准浏览器可以调用多达 30 MB 可自由定义的 HTML 页面;数据通过 FTP 从内部文件系统处理 - 标准诊断页面;
用于对设备所有插入机架的模块进行快速诊断,无需使用附加工具 - E-mail;
直接从用户程序发送包含身份验证信息的电子邮件。电子邮件客户端功能可以从控制系统直接向用户发出警告。 - 通过 FTP 进行通讯;
一种在大多数操作系统平台常用的开放式协议 - 30 MB RAM 文件系统可用于动态数据的缓存。
S7-300 PROFINET CPU 配备集成的 Web 服务器。使用标准 Web 浏览器,可从 S7-300 站读取信息: - CPU 一般信息
- 诊断缓存中的内容
- 变量表
- 变量状态
- 模板的状态
- 报警
- 工业以太网的相关信息
- PROFINET 站的拓扑结构
等时模式 同步模式系统功能支持同步耦合 - 分布式信号采集
- 通过 PROFIBUS 的信号传输
- 程序执行
使用等距PROFIBU 的周期。 这形成了可采集和处理输入信号并定期(恒定的总线循环时间)产生输出信号的自动化解决方案。同时创建一致的过程映像分割。 由于分布式 I/O 的等距和同步信号处理,S7-300 保证了精确可重复的规定过程响应时间。 支持系统功能同步模式的组件系列众多,可用于解决运动控制、测量值采集、高速闭环控制等方面要求严格的任务。 因此SIMATIC S7-300 目前适用于分布式自动化解决方案中的高速机加工过程,可确保极高精度和重复性。其结果是,在保持始终如一的最佳质量的同时提高产量。 模块的诊断和过程监视 SIMATIC S7-300 的许多输入/输出模块都具有智能能力: 诊断 可使用诊断来确定信号采集或模拟量处理是否分别在数字量模块或模拟量模块中功能正常。在评估诊断时,必须区别可参数化诊断消息和非可参数化诊断消息: - 可参数化诊断报警:
只有在由相关参数参数设置启用了诊断报警时,才可输出诊断报警。 - 非可参数化诊断报警:
无需任何参数设置即可输出这些报警。 若诊断报警处于活动状态(例如,“编码器电源掉电”),则模块输出一个诊断报警(对于可参数化诊断报警,只在相关参数化后输出)。CPU 中断执行用户程序或较低的优先级,处理相关的诊断中断块 (OB 82)。 运用VC#编程通过OPC方式实现PC机与西门子PLC通讯 1、 配置OPC服务器
对于服务器的配置与同步通讯的配置一样,这里不需再讲解,若有不清楚的,可以参阅之前发布的<运用VC#编程通过OPC方式实现PC机与西门子PLC通讯>
2、 OPC编程
变量组、项的命名规则与同步通讯的一样,这里不再描叙,下面主要就开发一个异步通讯类 AsynServer来讲解如何编程。
<1>、引用
在VC#开发环境中添加对OpcRcw.Da库以及OpcRcw.Comn库的引用,该库属于.NET库,不属于COM库,西门子虽然编写了类库,以提供对.NET平台的支持,但这些类库仍然难于编程,里面包含了大量的在托管和非托管区传输数据,因此我们需要在它的基础上再开发一个类库,以简化以后的编程,首先在类的开头使用命名空间:
using OpcRcw.Comn;
using OpcRcw.Da;
using System.Runtime.InteropServices;
using System.Collections;
<2>、编程
异步编程的原理就是在OPC服务器那边检测当前活动的变量组,一但检测到某一个变量,譬如变量Q0.0从1变成0,就会执行一个回调函数,以实现针对变量发生变化时需要实现的动作,在这里可以采用委托来实现该功能。
1、 在命名空间的内部、类 AsynServer声明之前添加委托的申明:
// 定义用于返回发生变化的项的值和其对应的客户句柄
public delegate void DataChange(object[] values,int[] itemsID);
2、 该类继承于西门子提供的库接口IOPCDataCallback
public class AsynServer:IOPCDataCallback
在类的开头部分声明变量:
struct groupStru
{
public int groupID;
public object groupObj;
}
internal const int LOCALE_ID = 0x407; //本地语言
private Guid iidRequiredInterface;
private string serverType="";
private int hClientGroup = 0; //客户组号
private int nSvrGroupID; // server group handle for the added group
private Hashtable hashGroup; //用于把组收集到一起
private int hClientItem=0; //Item号
3、编写构造函数,接收委托参数已确定当数据发生变化时需要执行的方法入口点:
//创建服务器
//svrType 服务器类型的枚举
//dataChange 提供用于在数据发生变化时需要执行的函数入口
public AsynServer(ServerType svrType,DataChange dataChange)
{
switch(svrType)
{
case ServerType.OPC_SimaticHMI_PTPR
serverType="OPC.SimaticHMI.PTPro";break;
case ServerType.OPC_SimaticNET:
serverType="OPC.SimaticNET";break;
case ServerType.OPC_SimaticNET_DP:
serverType="OPC.SimaticNET.DP";break;
case ServerType.OPC_SimaticNET_PD:
serverType="OPC.SimaticNET.PD";break;
case ServerType.OPCServer_WinCC:
serverType="OPCServer.WinCC";break;
}
hashGroup=new Hashtable(11);
dtChange=dataChange;
}
4、创建服务器
// 创建一个OPC Server接口
//error 返回错误信息
//若为true,创建成功,否则创建失败
public bool Open(out string error)
{
error="";bool success=true;
Type svrComponenttyp ;
//获取 OPC Server COM 接口
iidRequiredInterface = typeof(IOPCItemMgt).GUID;
svrComponenttyp = System.Type.GetTypeFromProgID(serverType);
try
{
//创建接口
pIOPCServer =(IOPCServer)System.Activator.CreateInstance(svrComponenttyp);
error="";
}
catch (System.Exception err) //捕捉失败信息
{
error="错误信息:"+err.Message;success=false;
}
return success;
}
5、 编写添加Group的函数
///
/// 添加组
///
/// 组名
/// /创建时,组是否被激活
/// //组的刷新频率,以ms为单位
/// 返回错误信息
/// 若为true,添加成功,否则添加失败
public bool AddGroup(string groupName,int bActive,int updateRate,out string error)
{
error="";bool success=true;
int dwLCID = 0x407; //本地语言为英语
int pRevUpdateRate;
float deadband = 0;
// 处理非托管COM内存
GCHandle hDeadband;
IntPtr pTimeBias = IntPtr.Zero;
hDeadband = GCHandle.Alloc(deadband,GCHandleType.Pinned);
try
{
pIOPCServer.AddGroup(groupName, //组名
bActive, //创建时,组是否被激活
updateRate, //组的刷新频率,以ms为单位
hClientGroup, //客户号
pTimeBias, //这里不使用
(IntPtr)hDeadband,
dwLCID, //本地语言
out nSvrGroupID, //移去组时,用到的组ID号
out pRevUpdateRate, //返回组中的变量改变时的最短通知时间间隔
ref iidRequiredInterface,
out pobjGroup1); //指向要求的接口
hClientGroup=hClientGroup+1;
groupStru grp=new groupStru();
grp.groupID=nSvrGroupID;grp.groupObj=pobjGroup1;
this.hashGroup.Add(groupName,grp);//储存组信息
// 对异步操作设置回调,初始化接口
pIConnectionPointContainer = (IConnectionPointContainer)pobjGroup1;
Guid iid = typeof(IOPCDataCallback).GUID;
pIConnectionPointContainer.FindConnectionPoint(ref iid,out pIConnectionPoint);
pIConnectionPoint.Advise(this,out dwCookie);
}
catch (System.Exception err) //捕捉失败信息
{
error="错误信息:"+err.Message;success=false;
}
finally
{
if (hDeadband.IsAllocated) hDeadband.Free();
}
return success;
}
6、 编写激活、或者取消激活组的函数
在同步编程中对于组的激活或者取消激活没有实质的意义,但在异步通讯编程中却异常重要,这是因为OPC服务器只对当前处于活动状态的组中的变量进行监控,同时这也是很有必要的,因为我们可以把不同界面中的变量编程不同的组,即同一界面中的变量规成一个组,而在某一时刻提供给用户的只有一个界面,让该界面中用到的组处于活动状态,这样执行委托调用时只会执行于该界面中有关的变量检测,而如果让所有的组处于活动状态,则当前没有显示给用户的界面用到的变量若发生变化也会触发对委托函数的调用,这根本是没有必要的,同时会大大降低程序的性能,请严格控制组的激活。
///
/// 激活或者取消激活组
///
/// 指定组名
/// true为激活,false为取消激活
/// 若有错误,返回错误信息
/// 若为true,添加成功,否则添加失败
public bool AciveGroup(string groupName,bool toActive,out string error)
{
error="";bool success=true;
//通过名称获取组
object grp=((groupStru)hashGroup[groupName]).groupObj;
IOPCGroupStateMgt groupStateMgt=(IOPCGroupStateMgt)grp;
//初始化传递参数
IntPtr pRequestedUpdateRate = IntPtr.Zero; //由客户指定的Item更新间隔时间
int nRevUpdateRate = 0; //由服务器返回的能够更新的最短时间间隔
IntPtr hClientGroup = IntPtr.Zero; //客户组
IntPtr pTimeBias = IntPtr.Zero;
IntPtr pDeadband = IntPtr.Zero;
IntPtr pLCID = IntPtr.Zero;
// 激活或者取消激活组
int nActive = 0;
GCHandle hActive = GCHandle.Alloc(nActive,GCHandleType.Pinned);
if(toActive)
hActive.Target = 1;
else
hActive.Target = 0;
try
{
groupStateMgt.SetState(pRequestedUpdateRate,out nRevUpdateRate,hActive.AddrOfPinnedObject(),pTimeBias,pDeadband,pLCID,hClientGroup);
}
catch(System.Exception err)
{
error="错误信息:"+err.Message;success=false;
}
finally
{
hActive.Free();
}
return success;
}
7、 向指定的组中添加变量的函数
///
/// 向指定的组添加一系列项
///
/// 指定组名
/// 完整的item名数组
/// 由服务器返回读写数据时需要使用的item号
/// 无错误,返回true,否则返回false
public bool AddItems(string groupName,string[] itemsName,int[] itemsID)
{
bool success=true;
OPCITEMDEF[] ItemDefArray=new OPCITEMDEF[itemsName.Length];
for(int i=0;i {
hClientItem=hClientItem+1; //客户项自动加1
ItemDefArray[i].szAccessPath = ""; // 可选的通道路径,对于Simatiic Net不需要。
ItemDefArray[i].szItemID = itemsName[i]; // ItemID, see above
ItemDefArray[i].bActive = 1; // item is active
ItemDefArray[i].hClient = hClientItem; // client handle ,在OnDataChange中会用到
ItemDefArray[i].dwBlobSize = 0; // blob size
ItemDefArray[i].pBlob = IntPtr.Zero; // pointer to blob
ItemDefArray[i].vtRequestedDataType = 4; //DWord数据类型
}
//初始化输出参数
IntPtr pResults = IntPtr.Zero;
IntPtr pErrors = IntPtr.Zero;
try
{
// 添加项到组
object grp=((groupStru)hashGroup[groupName]).groupObj;
((IOPCItemMgt)grp).AddItems(itemsName.Length,ItemDefArray,out pResults,out pErrors);
int[] errors = new int[itemsName.Length];
IntPtr pos = pResults;
Marshal.Copy(pErrors, errors, 0,itemsName.Length);
for(int i=0;i {
if (errors[i] == 0)
{
OPCITEMRESULT result = (OPCITEMRESULT)Marshal.PtrToStructure(pos, typeof(OPCITEMRESULT));
itemsID[i] = result.hServer;
pos = new IntPtr(pos.ToInt32() + Marshal.SizeOf(typeof(OPCITEMRESULT)));
}
else
{
String pstrError;
pIOPCServer.GetErrorString(errors[0],0x407,out pstrError);
success=false;
break;
}
}
SetItenClient(groupName,itemsID,itemsID); //要求始终只有一个组被激活,才不会引起冲突。
}
catch (System.Exception err) // catch for error in adding items.
{
success=false;
//error="错误信息:"+error+err.Message;
}
finally
{
// 释放非托管内存
if(pResults != IntPtr.Zero)
{
Marshal.FreeCoTaskMem(pResults);
pResults = IntPtr.Zero;
}
if(pErrors != IntPtr.Zero)
{
Marshal.FreeCoTaskMem(pErrors);
pErrors = IntPtr.Zero;
}
}
return success;
}
 在终端模块 TM31 上提供有以下接口: - 8 路数字量输入
- 4 路双向数字路输入/输出
- 2 路带转换触点的继电器输出
- 2 路模拟量输入
- 2 路模拟量输出
- 1 路温度传感器输入(KTY84-130 或 PTC)
- 2 个 DRIVE-CLiQ 插座
- 1 个电子装置电源接口,通过 24 V DC 电源连接器连接
- 1 个 PE/保护导体连接
TM31 端子模块可卡装在符合 EN 60715 (IEC 60715) TH 35 安装导轨上。 信号电缆屏蔽可以借助一个屏蔽线接线端子连接在终端模块 TM31 上,例如 Phoenix Contact 型号的 SK8 ,或者Weidmüller 型号的KLBü1。屏蔽接线端子在失去弹性时不能再使用。 端子模块 TM31 的状态通过一个多色 LED 来显示。 该装置最重要的组件为: - 反并联连接的双碟型晶闸管
- 触发电路根据版本可以在限定的电压下触发阻隔方向上的晶闸管。
- 一个用于检测灭磁/放电电阻上的电压的模块,可以检测传导的电流,识别出何时过压保护装置触发,并使用二元输入发出状态信号。
- 功率连接 C、D(铜母线)
- 端子 XEW1 用于连接来自灭磁/放电电阻的传感器线。
- 一个“可选快速灭磁”模块(选件 G11)。
该模块通过控制三个相互独立的快速继电器使晶闸管可以在任何时候触发。 反并联连接的两个晶闸管(位于连接 C 和 D 之间)可以短暂的(大约 5s)传导脉冲电流。过压会触发触发电路上的一个击穿二极管,而它会触发阻断晶闸管,并把触发电流经过阻断晶闸管通过一个反并联连接的二极管传输给它的闸门/阴极。击穿二极管与过压极性无关,总是利用桥式整流器以相同方向运行,而触发电流使用串联电阻限制在 6 到 8A 之间。晶闸管会在几毫秒之内触发,而电压会快速下降到正向电压(1 到 1.5V)。负载电流会在几秒钟之内提高碟型晶闸管的温度,而晶闸管和堆结构会吸收热能。这样一来,负载循环只能等到冷却时间过去之后才能重复(见技术规范)。 快速灭磁选件(G11)连接到触发电路上的方式使晶闸管可以随时通过至少三个继电器中的一个触发 - 三个继电器是相互独立的。这假定了电压足够大。一般来说,它大概为触发电压的 5%。三个都可以使用 24V 直流、110 V 到 125 V 直流或 220 V 到 240 V 直流控制。 用于灭磁/放电电阻的电压检测装置连接到外部灭磁/放电电阻上。当电压检测响应时,必须阻断供电变频器,或者控制电流降到 0。电压检测模块需要一个最小 100mA 的外部 24V 直流电源。 灭磁/放电电阻是一个外部器件,不包括在 SICROWBAR DC 过压保护装置交付范围内。它的电阻值必须足够高,以便即使在最高负载电流下电压仍然能够保持在保护供电变频器或绕组的破坏性限制以内。最低的电阻值由转换器的供电电压和最高负载电流限定(确定保险规格)。在确定电阻值时还必须考虑所需的灭磁时间。
| 




